Support Vector Machine 이해를 위한 Lagrangian Dual Problem 이해해보기
최적화 수업을 듣지 않고 어디까지 이해할 수 있을까...
Optimization with inequality constraints
다음과 같은 최적화 문제를 생각해보자.
$$
\begin{align*}
\textbf{Primal Problem:}\quad minimize &\quad f_0(\mathbf{x}) \quad (\mathbf{x} \in \mathbb{R}^n, ;domain;\mathcal{D})\\\
s.t. &\quad f_i(\mathbf{x}) \leq 0, \quad ^\forall i \in [m] \\\
&\quad h_i(\mathbf{x})=0 \quad ^\forall i \in [p]
\end{align*}
$$
우리가 익숙한 Lagrange Multiplier에서는 제약식이 등호로만 되어있었지만, 이제는 부등식이 추가되었다. 이러한 경우 부등호 조건식 $f_i(\mathbf{x})$를 inequality constraints, 등호 조건식 $h_i(\mathbf{x})$를 equality constraints라고 한다.
부등호 조건이 들어간 최적화 문제를 푸는 것은 참 막막한 일이다. 하지만 만일 이 최적화가 어떤 조건을 만족한다면, 우리는 이 문제를 그나마 알고리즘으로 쉽게 풀 수 있는 형태로 바꿀 수 있는데, 그 조건을 KKT condition이라고 하고, 원래의 최적화 문제를 살짝 바꾼 형태를 Lagrangian Dual problem이라고 한다.
위의 최적화 문제를 Primal problem이라고 하자. 이 primal에 해당하는 Lagrangian은 다음과 같이 쓸 수 있다.
$$
\textbf{Lagrangian:}\quad L(\mathbf{x,\lambda, \nu}) = f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i f_i(\mathbf{x}) + \sum_{i=1}^p \nu_i h_i(\mathbf{x})\\\
(\lambda_i \geq 0 \quad ^\forall i \in [m])
$$
이제부터 우리는 $\mathbf{x}$의 도메인 전체에서 생각하지 말고, 그 중에서 조건식을 만족하는 $\mathbf{x}$에 대해서만 생각해보자. 이러한 값들을 우리는 feasible한 $\tilde{\mathbf{x}}$라고 부를 것이다.
이 feasible한 $\tilde{\mathbf{x}}$ 중에서, 목적함수를 최소화하는 (즉 primal 문제의 해가 되는) $\mathbf{x}_p$ 에 대한 목적함수의 값을 $p^{star}$라고 하자.
이게 조건식을 만족하면서 목적함수를 가장 작게 만들 수 있는 값이며, 우리의 목적은 이 $\mathbf{x}_{p}$를 구하는 것이다.
만일 부등호 조건이 없는 unconstrained 문제였다면 그냥 $\dfrac{\partial L}{\partial \mathbf{x}}=0$, $\dfrac{\partial L}{\partial \mathbf{\lambda}}=0$, $\dfrac{\partial L}{\partial \mathbf{\nu}}=0$ 을 풀어서 나오는 연립방정식을 풀면 된다. 그러나 부등호 조건이 있는 constrained 문제에서는 다른 접근이 필요한데, 핵심은 이 문제를 Convex Optimization 문제로 바꾸는 것이며, Lagrangian Dual은 그 방법을 제시한다.
Lagrange Dual Function
먼저 이 라그랑지안의 Lower bound에 대해 생각해보자. 계수 $\lambda_i, \nu_i$가 주어졌을 때, feasible한 $\mathbf{x}$를 내 맘대로 움직여 가장 낮게 내려간다면 어디까지 갈 수 있을까? 이를 수식으로 보이면 다음과 같다.
$$
\begin{align*}
\textbf{Lagrange Dual:}\quad g(\mathbf{\lambda, \nu}) &= \inf_{\mathbf{x}\in \mathcal{D}^*} L(\mathbf{x, \lambda, \nu})\\\
&= \inf_{\mathbf{x}\in \mathcal{D}^*}[f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i f_i(\mathbf{x}) + \sum_{i=1}^p \nu_i h_i(\mathbf{x})]
\end{align*}
$$
(infimum이란 하한선 중 가장 큰 값 (the greatest lower bound)을 의미하는 데, 예컨대 개구간 $(-1, 1)$에서의 infimum은 $-1$이다.)
Lagrange Dual $g(\lambda, \nu)$은 다음과 같은 중요한 특성을 가지고 있다.
-
모든 feasible한 $\mathbf{x}$에 대해 $g(\lambda, \nu)$는 목적함수 $f_0(\mathbf{x})$의 Lower Bound이다.
Lagrange Dual은 $\mathbf{\lambda, \nu}$의 값에 따라 값이 정해지는 $\mathbf{\lambda, \nu}$의 함수인데, 일단 $\mathbf{\lambda, \nu}$가 정해지면 $\mathbf{x}$의 값은 feasible한 $\mathbf{x}$ 중에서 $L(\mathbf{x,\lambda, \nu})$의 값이 infimum이 되도록 알아서 정해진다. 그런데 이 라그랑지안 $L(\mathbf{x,\lambda, \nu})$의 값은, $\lambda_i \geq 0$이면 (부등호 조건식이 살아있다면) 항상 목적함수 $f_0(\mathbf{x})$보다 작다. 라그랑지안은 원래 목적함수에 0보다 작은 부등호 조건식을 더한 식이기 때문이다. 그러므로 우리는 모든 feasible한 $\mathbf{x}$에 대하여 Dual이 목적함수보다 작다고 말할 수 있다. 이러한 성질을 Lower bound property라고 한다.
$$ \textbf{Lower bound property:}\quad g(\lambda, \nu) \leq p^* \quad \text{if}\quad \lambda \geq 0 $$
$$ \begin{align*} \text{proof:} \quad & \text{for } \mathbf{x}\in \mathcal{D}^* \text{ and } \lambda \geq 0,\\\ & p^* \geq f_0(\mathbf{x}) \geq L(\mathbf{x, \lambda, \nu}) \geq \inf_{\mathbf{x}\in \mathcal{D}^*} L(\mathbf{x, \lambda, \nu}) = g(\mathbf{\lambda, \nu}) \end{align*} $$
-
$g(\lambda, \nu)$는 $\lambda, \nu$에 대해 Concave하다.
Lagrange Dual의 식 $g(\mathbf{\lambda, \nu}) = \inf_{\mathbf{x}\in \mathcal{D}^*}[f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i f_i(\mathbf{x}) + \sum_{i=1}^p \nu_i h_i(\mathbf{x})]$에서 중요한 것은 $f_i(\mathbf{x}) \leq 0$인 조건식이다. 어차피 feasible한 $\mathbf{x}$에 대해서는 등호 조건 $h_i(\mathbf{x})$이 0으로 죽어버리니 $\nu$는 뭐가 되든 상관이 없다. 그러나 만일 어떤 $\mathbf{x}$에 대하여 $f_i(\mathbf{x}) < 0$ 인데, 그 앞에 붙은 계수가 $\lambda_i>0$이면 (계수가 살아있다면), 라그랑지 듀얼의 값은 $\lambda_i =0$일 때에 비하여 감소할 것이다. 심지어 어떤 $\lambda_i$에 대해서는 라그랑지 듀얼이 $-\infty$가 될 수도 있다. 이런 의미에서 우리는 **Lagrange Dual이 $\lambda, \nu$에 대한 concave** 함수임을 알 수 있다.
(정확히 말하면 $g$가 계수 $\lambda, \nu$에 대해 affine function이므로, affine family에서의 infimum은 concave이기 때문이라고 하는데, 뭔 말인지는 나도 모르겠으니 대충 넘어가자. 또한 concave의 대략적인 의미는 그냥 x축에 대해 오목하여, global maximum이 존재한다 쯤으로 생각하자. 자세한 정의는 https://en.wikipedia.org/wiki/Concave_function)
그렇다면 이제 관점을 바꾸어서, 이렇게 concave한 라그랑지안 듀얼 $g(\mathbf{\lambda, \nu})$의 값을 최대화하는 $\lambda, \nu$를 구해보자. 즉 primal 라그랑지의 하한선인 Lagrange Dual에 대해, 이를 최대화하는 어차피 feasible한 $\mathbf{x}$에 대해서는 등호 조건식은 다 0이 되버리므로 $\nu$는 중요하지 않으니, 이는 사실상 $\lambda$에 대한 최적화 문제와 같다. 이를 써보면 다음과 같다.
$$
\begin{align*}
\textbf{Dual Problem:}\quad maximize &\quad g(\mathbf{\lambda, \nu})= \inf_{\mathbf{x}\in \mathcal{D}^*} L(\mathbf{x, \lambda, \nu})\
s.t. &\quad \lambda_i \geq 0 \quad ^\forall i \in [m]
\end{align*}
$$
이 문제는 Primal problem보다 풀기가 훨씬 수월하다. 왜냐하면 Primal Problem에서 목적함수 $f_0(\mathbf{x})$는 convex인지, concave인지, 이도저도 아닌지 알 수가 없지만, Dual Problem의 목적함수 $g(\lambda, \nu)$는 concave하므로, (concave 함수의 최대화는 곧 convex 함수의 최소화 문제와 마찬가지니까) convex optimization 알고리즘을 쓸 수 있기 때문이다. 또한 조건식이 $\lambda \geq 0$ 하나로 줄어든 것도 큰 이점이다.
이러한 Dual Problem를 최적화하는 해답을 $\lambda_d, \nu_d$라고 하고, 이 때의 라그랑지안 듀얼 $g(\mathbf{\lambda_d, \nu_d})= \inf_{\mathbf{x}\in \mathcal{D}^*} L(\mathbf{x, \lambda_d, \nu_d})$의 값을 $d^*$라고 하자. 지금까지의 논의를 종합하면 $d^*$는 다음과 같이 쓸 수 있다.
$$ d^* = \max_{\lambda, \nu} \inf_{\mathbf{x} \in \mathcal{D}^*} L(\mathbf{x,\lambda, \nu}) $$
라그랑지 듀얼이 항상 목적함수 $f_0(\mathbf{x})$의 lower bound이므려, 라그랑지 듀얼의 최댓값인 $d^$도 $p^$ 보다 작거나 같을 것인데, 이런 당연한 성질을 weak duality라고 한다. 이건 우리의 관심사가 아니다. 그러나 특정한 조건을 만족하거나, 혹은 원래 Primal의 목적함수가 convex할 경우에는 대부분 $d^=p^$가 되는데, 이를 strong duality라고 하며, 이렇게 되는 조건을 constraint qualifications라고 한다. 이런 조건을 만족하면, 우리는 원래의 Primal 문제를 우회하여 더 수월한 Dual 문제를 풀 수 있는 것이다.
$$ \begin{align*} \textbf{Weak Daulity:}&\quad d^* \leq p^* \quad \text{(always holds)}\\\ \textbf{Strong Daulity:}&\quad d^* = p^* \quad \text{(iff constraint qualifications hold)} \end{align*} $$
Lagrange Dual: Geometric Intuition
$d^,p^$의 관계를 그림으로 나타내면 다음과 같다. 여기에서 $t$는 목적함수 $f_0(\mathbf{x})$, $u$는 부등호 조건식 $f_1(\mathbf{x})$를 의미하며, 이 두 값을 결정하는 $\mathbf{x}$는 그래프에 나오지 않은 매개변수로 생각할 수 있다. $\mathcal{G}$는 $\mathbf{x}$의 도메인에서 목적함수와 조건식이 가질 수 있는 모든 값의 영역을 나타내며, feasible한 $\mathbf{x}$에 대해서는 $u\leq 0$이 되어야 하므로 feasible한 영역은 노란색으로 표시한 부분이다.
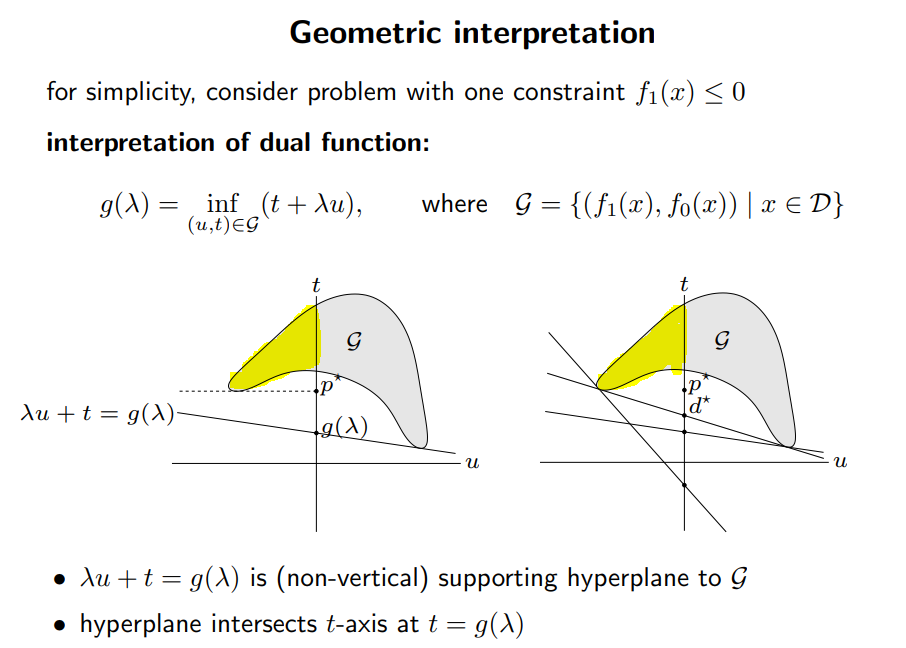
(출처: http://web.stanford.edu/class/ee364a/lectures/duality.pdf)
조건식을 만족하면서 (feasible하면서) 목적함수의 값 $t$를 최소화하는 지점은 노란색 영역의 가장 왼쪽 아래 끄트머리 지점이며, 이 지점에서의 매개변수가 $\mathbf{x^}$일 것이고, 이 때의 목적함수의 값이 $p^$가 될 것이다.
$\lambda$의 값이 주어졌다면 라그랑지안 듀얼 $$ g(\lambda)= \inf _{\mathbf{x}\in \mathcal{D}^}L(\mathbf{x,\lambda}) = \inf _{\mathbf{x}\in \mathcal{D}^}[f_0(\mathbf{x}) + \lambda f_1(\mathbf{x})] = \inf _{\mathbf{x}\in \mathcal{D}^*}[t+\lambda u] $$ 은, $(t,u)$ 좌표평면에서 $t+\lambda u = g(\lambda)$를 만족하는 모든 점들의 집합으로, 직선으로 나타날 것이다. 이 직선을 Supporting Hyperplane이라고 한다.
Supporting Hyperplane이 가지는 중요한 특성은 다음과 같다.
- Supporting Hyperplane은 직선이다. 이건 당연하지.
- Supporting Hyperplane은 항상 $\mathcal{G}$보다 아래에 있어야한다. $u$축의 값을 하나 고정하여 그린 수직선과 $\mathcal{G}$가 만나는 지점들의 $t$값들은, 조건식 $u=f_1(\mathbf{x})$의 값이 주어졌을때의 목적함수 $t= f_0(\mathbf{x})$가 가질 수 있는 값들의 범위와 같다. 이때 라그랑지 듀얼은 첫 번째 성질 **“모든 feasible한 $\mathbf{x}$에 대해 $g(\lambda, \nu)$는 목적함수 $f_0(\mathbf{x})$의 Lower Bound이다."**에 의하여, $u$축에서 그은 수직선 위에서 항상 $\mathcal{G}$보다 아래에 있어야한다.
- Supporting Hyperplane의 위치는 $\lambda$가 결정한다. 우선 기울기가 $\lambda$에 따라 결정되며, $\lambda$가 바뀌면 $g(\lambda)= \inf _{\mathbf{x}\in \mathcal{D}^}L(\mathbf{x,\lambda})$를 만족하면 $\mathbf{x^}$의 값도 다를 것이므로 직선의 위치도 바뀐다.
- Supporting Hyperplane은 항상 feasible한 도메인에 접해야 한다. 때문에 왼쪽 그림에서 그려진 직선은 엄밀히 말하면 $\mathbf{x}$의 feasible한 도메인 밖에 있기 때문에 그릴 수 없는 직선이다.
이를 모두 종합해 고려하면, $g(\lambda)$를 최대화하는 $\lambda$를 고르는 Dual 문제는 $\mathcal{G}$의 feasible한 영역 중 한 점을 골라 $\mathcal{G}$를 떠받드는 supporting hyperplane을 그리는 문제로 볼 수 있다. 또한 오른쪽 그림을 보면, $\lambda$의 값에 따라 그릴 수 있는 수많은 supporting hyperplane중에서, 위 네 가지 성질을 만족하면서 $t$축에서의 값 $g(\lambda)$가 최대가 되는 직선은 하나이며, 거기에서의 값이 $d^*$임을 알 수 있다.
위 사례는 목적함수 $f_0(\mathbf{x})$이 concave한 경우에 해당한다. 만일 $f_0(\mathbf{x})$이 convex하다면 그려지는 $\mathcal{G}$도 그 모양이 아래로 볼록하며, 그 결과 $p^=d^$가 될 것임을 어렵지 않게 짐작할 수 있다. 즉 Convex optimization 문제에서는 Primal Problem을 Dual Problem으로 바꿔서 풀 수 있다는 것이다.
그러나 이 조건만으로는 Dual Problem을 풀기에 부족하다. Convex하지만 $d^* < p^*$일 수도 있고, convex하지 않은데 $d^* = p^*$일 수도 있다. 때문에 좀 더 일반적인 조건이 필요하다.
Complementary Slackness
문제의 방향을 거꾸로 틀어, 일단 Strong Duality가 성립한다고 가정해보자. 이때 $\mathbf{x}^$를 Primal 문제의 해라고 해서 Primal Optimal이라고, $(\lambda^, \nu^)$를 Dual 문제의 해라고 해서 Dual Optimal이라고 부른다. $d^=p^*$이므로 다음과 같이 쓸 수 있다.
$$
\begin{align*}
p^*=f_0(\mathbf{x}^*) = d^* &= \inf_{\mathbf{x}\in \mathcal{D}^*} L(\mathbf{x, \lambda^*, \nu^*})\\\
&=\inf_{\mathbf{x}\in \mathcal{D}^*}[f_0(\mathbf{x}) + \sum_{i=1}^m \lambda_i^* f_i(\mathbf{x}) + \sum_{i=1}^p \nu_i^* h_i(\mathbf{x})]\\\
&\leq f_0(\mathbf{x^*}) + \sum_{i=1}^m \lambda_i^* f_i(\mathbf{x^*}) + \sum_{i=1}^p \nu_i^* h_i(\mathbf{x^*})\\\
&\leq f_0(\mathbf{x^*}) = p^*
\end{align*}
$$
첫 번째 줄과 두 번째 줄은 정의를 그대로 적었을 뿐이다. 핵심은 (1) 두 번째에서 세 번째로 내려가는 부분과, (2) 세 번째에서 막줄로 가는 부분이다. 만일 $d^=p^$가 성립한다고 하면 맨 처음과 맨 마지막이 다 똑같으니 중간에 있는 모든 부등호도 등호로 바뀌어야 한다. 때문에 다음이 성립한다.
-
Dual 문제를 풀어서 $(\lambda^, \nu^)$를 구했다고 치자. 이걸 라그랑지에 넣어서 $L(\mathbf{x, \lambda^, \nu^})$를 구했다고 하자. 이때 이 식을 최소화하는 $\mathbf{x}$는 바로 Primal의 해 $\mathbf{x^*}$이다. 때문에 Primal Problem을 풀 필요 없이 Dual Problem을 풀어 라그랑지 식을 $\mathbf{x}$에 대해 최소화하면 된다.
-
$\lambda_i \geq 0$이고 , $f_i(\mathbf{x})\leq0$임을 기억하자. (2)이 의미하는 바는 다음과 같다. $$ f_0(\mathbf{x^*}) + \sum_{i=1}^m \lambda_i^* f_i(\mathbf{x^*}) + \sum_{i=1}^p \nu_i^* h_i(\mathbf{x^*})= f_0(\mathbf{x^*}) $$ $h_i(\mathbf{x})$는 어차피 feasible한 $\mathbf{x}$에 대해서는 $0$이 되니 무시하자. 문제는 $f_i(\mathbf{x})$인데, 위 식이 성립하려면 모든 조건식에 대해 $\lambda_i f_i(\mathbf{x}) \leq 0$이어야만 한다. 즉 $\lambda_i^*=0$이면 조건식이 음수든 뭐든 상관이 없지만, $\lambda_i^*\ne 0$으로 살아있다면 조건식은 무조건 $0$이 되어야 한다는 것이다. 이 조건을 **Complementary Slackness**라고 부른다.
이를 벡터로 생각해본다면, Primal optimal $\mathbf{x^}$가 주어졌을 때 두 벡터 $\lambda$와 $f_i(\mathbf{x^})$는 complementary sparse해야한다는 것. 즉 어떤 행에서 한 놈이 0이 아니면 다른 놈이 0이 되어야 한다는 것이다. 쉽게 말하면 람다가 살아있는 부등호 조건식은 프라이멀 옵티멀에서 $0$이 되어야 한다로 생각할 수 있겠다.
Karush-Kuhn-Tucker conditions
지금까지의 논의를 종합해보자. 만일 어떤 Primal Problem에 대해 Strong duality가 성립한다면, $\mathbf{x}^$ Primal Optimal, $(\lambda^, \nu^*)$ Dual Optimal은 다음의 조건을 만족해야 하는데, 이를 통틀어 KKT conditions이라고 한다.
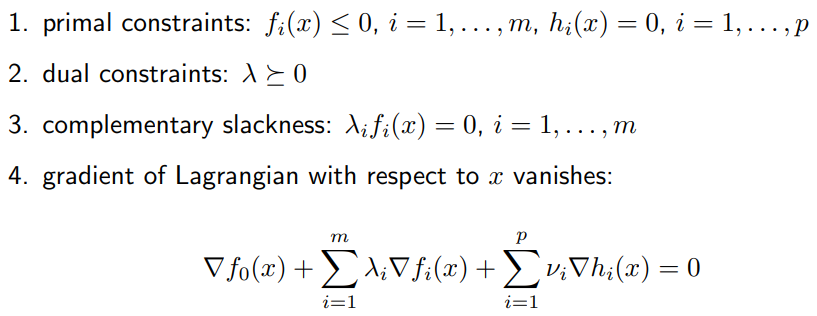
(출처: http://web.stanford.edu/class/ee364a/lectures/duality.pdf)
1번은 primal feasibility, 2번은 dual feasibility라고도 부르는데, 이는 $\mathbf{x}^{star}$가 Primal Optimal, $(\lambda^{star}, \nu^{star})$가 Dual Optimal이 되기 위한 조건이므로 Strong duality와는 상관이 없다. 여기서 중요한 것은 앞서 살펴본 3번 complementary slackness와 4번 $\nabla{\mathbf{x}}{L}=0$이다. 4번이 " Dual을 풀어서 나온 $L(\mathbf{x, \lambda^{star}, \nu^{star}})$을 최소화하는 $\mathbf{x}$는 바로 Primal Optimal $\mathbf{x^{star}}$“라는 말이다.
지금까지 본 것은 Strong Duality $\rightarrow$ KKT Conditions이다. 이는 Primal의 목적함수가 convex이든 concave이든 항상 성립한다. 그러나 만일 Primal이 convex이면 Strong Duality $\leftarrow$ KKT Conditions가 성립한다. 왜 그런지는슬라이드에서 안 알랴줘서 나도 모르겠는데, 위의 geometric interpretation을 보면 대충 감이 오지 않을까? 때문에 만일 내가 푸는 최적화 문제가 부등호 조건이 들어갔는데, 이 놈의 Dual을 풀어보니 KKT condition을 만족하는 $(\lambda^{star}, \nu^{star})$이 존재하면, 그냥 Dual 문제를 풀어 나온 $(\lambda^{star}, \nu^{star})$를 대입한 라그랑지를 최소화하는 $\mathbf{x^{stsr}}$를 구하면 된다는 것.
이제 이걸 SVM에 적용해보자.
Applications: Support Vector Machines
SVM에 대한 자세한 내용은 04/23 학회 세션과 유투브 강의를 참고하도록 하자.
-
https://github.com/YonseiESC/ESC20-WINTER/blob/master/ISL/lectureNotes/ISL09.pdf
-
https://www.youtube.com/watch?v=DIpC35L9Ons&list=PLTGzWF3DajHQZ7zXesjid0zxmGdaNS4-K&index=36
-
https://www.youtube.com/watch?v=O6Ha_XyA9ys&list=PLTGzWF3DajHQZ7zXesjid0zxmGdaNS4-K&index=37
-
https://www.youtube.com/watch?v=OfykM7rnrts&list=PLTGzWF3DajHQZ7zXesjid0zxmGdaNS4-K&index=38
-
https://www.youtube.com/watch?v=QZtcXkaF0m8&list=PLTGzWF3DajHQZ7zXesjid0zxmGdaNS4-K&index=39
-
https://www.youtube.com/watch?v=dKcNWAWTML4&list=PLTGzWF3DajHQZ7zXesjid0zxmGdaNS4-K&index=40
여기서는 Lagrange Dual이 어떻게 SVM에 적용되는지에 대해서만 살펴보겠다.
Classification에서 SVM이란 서로 다른 클래스의 데이터 산점도 사이에 어떤 중앙선을 그리고, 그 중앙선 양 옆으로 2차선 도로를 그리는데, 그 도로의 폭이 최대한 넓도록 중앙선을 그리는 것이다. 그 중앙선을 Hyperplane으로 볼 수 있는데, 식으로 쓰면 다음과 같다.
$$ \textbf{Hyperplane} \quad y(\mathbf{x}) = \mathbf{w}^T\mathbf{x} + b = 0 $$
가장 넓은 도로 폭을 그리는 문제를 최적화 문제로 나타내면 다음과 같다.
$$
\begin{align*}
\textbf{Primal Problem} \quad \min_{\mathbf{w},b} &\quad \frac{1}{2} |\mathbf{w}|^2\
s.t. &\quad 1-t_i(\mathbf{x^Tx}_i + b) \leq 0 ;;^{\forall} i \in [n]
\end{align*}
$$
이 최적화 문제의 라그랑지안과 KKT 조건은 다음과 같다.
$$ \textbf{Lagrangian:} \quad L(\mathbf{w},b,\lambda) = \frac{1}{2}|\mathbf{w}|^2 + \sum^n _{i=1}\lambda_i[1-t_i(\mathbf{w^Tx}_i+b)] $$
$$
\textbf{KKT Conditions}\quad
\begin{cases}
\textbf{Primal feasibility: } & 1-y_i(\mathbf{w^Tx}_i+b) \leq 0 ;;^{\forall} i \in [n]\\\
\textbf{Dual feasibility: } &\lambda_i \geq 0 ;;^{\forall} i \in [n]\\\
\textbf{Complementary slackness: } &\lambda_i[1-t_i(\mathbf{w^Tx}_i+b)]=0 ;;^{\forall} i \in [n]\\\
\textbf{Stationarity: } &\dfrac{\partial L}{\partial w_i}= \dfrac{\partial L}{\partial b} = 0
\end{cases}
$$
Primal Problem의 목적함수 $\frac{1}{2} |\mathbf{w}|^2$은 convex 함수이다. 때문에 Primal과 Dual의 해가 이 조건을 만족한다고 가정하면, 우리는 Dual 문제를 풀어 Primal의 해인 Hyperplane $(\mathbf{w}, b)$ 를 구할 수 있다. 듀얼을 푸는 방법은 다음과 같다. 프라이멀과 듀얼의 옵티멀은 KKT 조건을 만족할 것이다. 떄문에 **KKT 조건을 $(\mathbf{w}, b, \lambda)$에 대한 연립방정식으로 보고 문제를 풀면 된다. **
SVM에서의 KKT 조건 중에 가장 중요한 것은 Complementary Slackness이다. 제대로 분류된 데이터는 모두 중앙선 도로 밖에 있으니 $t_i(\mathbf{w^Tx}_i+b)>1$이며, 때문에 이에 해당하는 부등호 조건식 $1-t_i(\mathbf{x^Tx}_i + b)$은 0보다 작은 음수이다. 이떄 KKT 조건에 의해 이 조건식에 해당하는 $\lambda_i$는 0이 되어야 한다. 이는 즉 SVM에서 도로 가에 위치한 Support vector 외에 다른 모든 관측치들은 hyperplane의 결정에 아무런 영향이 없다는 것이다.
먼저 네 번째 조건에 따라 라그랑지안을 $\mathbf{w},b$에 대해 미분한다.
$$ \nabla_{\mathbf{w}}L|_{(\mathbf{w=}\mathbf{w^*})} = \mathbf{w^*} - \sum_{i=1}^n \lambda_i t_i \mathbf{x}_i = 0 $$
$$ \dfrac{\partial L}{\partial b}|{b=b^*} = \sum{i=1}^n \lambda_it_i=0 $$
이를 라그랑지안 $L(\mathbf{w},b,\lambda)$에 대입하면 Dual의 목적함수 $L(\mathbf{w^}, \mathbf{b^}, \lambda)$를 구할 수 있다.
$$ L(\mathbf{w^}, \mathbf{b^}, \lambda)= \sum^n \lambda_i - \frac{1}{2} \sum_{i,j}^n t_it_j\lambda_i\lambda_j \langle \mathbf{x}_i,\mathbf{x}_j\rangle $$
이렇게 해서 Dual Problem을 써보면
$$
\begin{align*}
\textbf{Dual Problem}\quad
&\max_{\lambda} L(\mathbf{w^*}, \mathbf{b^*}, \lambda) = \sum^n \lambda_i - \frac{1}{2} \sum_{i,j}^n t_it_j\lambda_i\lambda_j \langle \mathbf{x}_i,\mathbf{x}_j\rangle \\\
s.t. \quad & \lambda_i \geq 0 ;;^{\forall} i \in [n]\\\
;& \sum^n_{i=1} \lambda_i t_i = 0
\end{align*}
$$
이렇게 $\alpha^$를 구하고 나면 $\mathbf{w}^$는 $\dfrac{\partial L}{\partial w_i}=0$ 인 조건을 이용해 구할 수 있으며, $b^*$는 Hyperplane의 위치를 생각해보면 아래처럼 쉽게 구할 수 있다.
$$
\begin{align*}
\mathbf{w}^* &= \sum^n \lambda_it_i\mathbf{x}_i\\\
b^* &= -\frac{1}{2}(\max_{i|t_i=-1}\mathbf{w}^{*T}\mathbf{x}_i + \min_{i|t_i=1}\mathbf{w}^{*T}\mathbf{x}_i)
\end{align*}
$$
Kernel SVM for Non-linear Decision Boundary
이 식을 보면, 새로운 관측치 벡터 $\mathbf{x}_h$가 주어졌을 때 이는 어디로 분류될 것인지는 전적으로 새로운 벡터와 기존 training set의 모든 벡터와의 내적에 의해 결정되는 것을 알 수 있다.
$$ \begin{align*} \mathbf{w^Tx}_h +b &= (\sum^n_{i=1} \lambda_it_i\mathbf{x}_i)^T\mathbf{x}_h + b = \sum^n_{i=1} \lambda_i t_i \langle \mathbf{x}_i,\mathbf{x}_h\rangle + b \end{align*} $$
때문에 만일 우리가 관측치 벡터에 대해 feature extraction을 했다면, 내적의 자리에 $\langle \phi(\mathbf{x}_i),\phi(\mathbf{x}_h)\rangle$를 집어 넣으면 되는 것이고, 만일 feature extraction 없이 Mercer Theorem을 이용해 곧바로 kernel를 구했다면, 그 함수를 저 자리에다가 넣기만 하면 되는 것이다.
중요한 점은 앞서 살펴봤듯이 complementary slackness에 의해 support vector 외의 점에서는 $\lambda_i=0$이므로, 결국은 새로운 데이터의 예측을 위해서 support vector와의 내적만 계산하면 된다는 것. PRML 책 6장의 6.1절을 보면 알겠지만 Linear Regression의 경우 새로운 데이터의 예측을 위해 모든 점과의 내적을 구해야 했다. 그러나 SVM은 몇몇 벡터와의 내적만 계산하면 된다. 때문에 SVM을 Sparse Kernel machine이라고도 부른다.
Soft-Penailizing Errors
만일 도로 안에 몇 개 데이터가 있어도 되고, 심지어 중앙선을 넘어도 허용하는 soft-penalizing의 경우 Primal의 조건식이 이에 맞게 살짝 바뀌는데, 핵심은
$t_i(\mathbf{x^Tx}_i + b) \leq 1 - \epsilon_i$
으로 조금의 오차가 허용되는 대신, 그 오차의 총량 $C\sum_{i=1}^n \epsilon_i$을 목적함수에 갖다넣어서 오차의 총량을 규제하는 것이다. 이 때도 마찬가지로 KKT 조건을 이용해 Dual 문제를 풀면 위와 동일한 결과가 나온다. 자세한 내용은 세션을 참고하자.
Support Vector Regression
Regression에서 SVM은 Classification과 반대로 어떤 Hyperplane을 그리는데, 중앙선 양 옆 2차선 도로에 최대한 많은 데이터를 집어넣을 수 있는 중앙선을 그리는 방법이다. 이때 도로의 폭은 개별 관측치가 도로 밖에 얼마나 멀리 떨어져 있어도 되냐에 따라 결정되는데, 만일 도로에서 탈선할 정도를 최대한 적게 하려면 데이터의 분포에 꼭 잘 들어맞는 도로가 만들어질 것이며, 반대로 탈선할 정도를 많이 눈감아주면 데이터의 모양에 대략적으로 들어맞는 도로가 나올 것이다.
SV regression에 해당하는 Primal Problem은 다음과 같이 쓸 수 있다.

(출처: https://www.mathworks.com/help/stats/understanding-support-vector-machine-regression.html)
여기서 $\epsilon$은 도로의 폭인데, 뭐가 되는 크게 상관이 없다. 중요한 것은 탈선한 정도인 $\xi$ 와, 탈선한 정도의 총량을 규제하는 상수 $C$이다. $C$의 값이 크면 탈선을 많이 규제하는 것이다. $C$의 값에 따른 SVR의 결과는 다음과 같다.
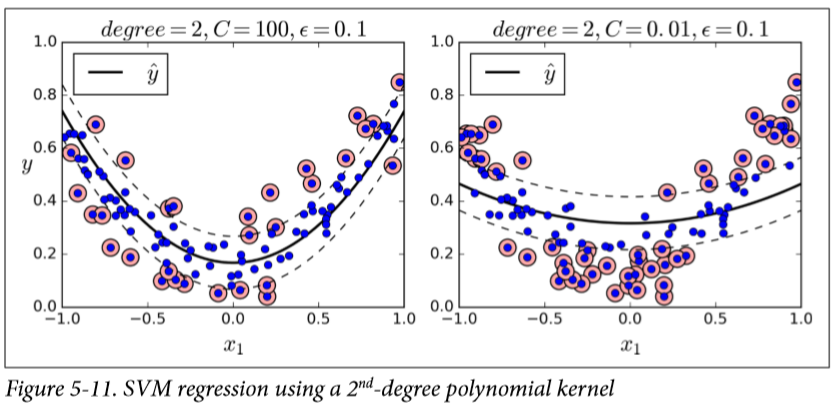
(출처: Hands on Machine Learning)